項目研究和實驗的目的、內容和要解決的主要問題
Ⅰ、課題研究的目的
全球化石能源的逐漸匱乏,自然環境的不斷惡化越來越受到人們的關注。而對其影響最大的就是汽車產業,傳統的車輛對石油的巨大依賴,排放也對大氣造成污染,為此,發展低油耗,低排放的混合動力汽車刻不容緩。混合電動汽車兼具內燃機汽車和純電動汽車的優點,現有的很多家汽車生產商都積極發展混合動力汽車,也正說明了混合動力汽車將會是不久未來的主流趨勢。
目前世界各國研究開發的混合動力電動汽車,根據其驅動系統的配置和組合方式不同可分為3種方式:并聯式(Parallel Hybrid)、串聯式(Series Hybrid)、混聯式(Series-parallel Hybrid)。其中混聯式效率較高,可使發動機在大部分轉速下工作在高效區,且可實現多種控制策略,能夠適應多種不同工況循環。
我們的目的是找到一種合適的機構,使發電機和發動機能夠以一種最合適的方式運行以降低油耗和排放。設計制造能滿足混聯式混合動力電動客車的縮小比例的五桿行星輪系動力耦合傳動系統。
Ⅱ、項目內容
設計制造縮小比例的五桿行星輪系動力耦合傳動系統要實現的模式:
(1).發動機啟停模式 (2).純電動模式 (3).發動機與電動機聯合驅動模式 (4).發動機單獨驅動模式 (5).再生制動模式
經過方案的設計與優選,我們確定了耦合傳動系統的結構簡圖如圖1.1所示。
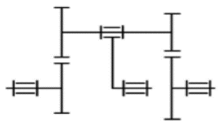
圖1.1
經過轉化我們得到耦合傳動系統的原理圖如圖1.2所示。
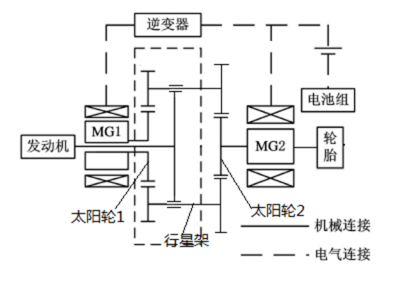
圖1.2原理圖
該耦合傳動系統在不同工況下的原理描述:
2.1 啟動工況
(1)過程描述:
點火鑰匙打到start擋,MG1立即帶動動發動機到1000轉左右,并開始點火噴油,直至發動機水溫(ECT)和氧傳感器達到工作狀態。同時比對預設的SOC值,如果檢測到SOC低于其設定的目標值,發動機就會給蓄電池充電,同時也提高了發動機的負荷;否則,發動機停止運轉。
(2)工作狀態:
蓄電池驅動MG1作電動機,帶動太陽輪1正向轉動(定義順時針為正,以下同),行星架同行星輪由一個轉動副連接,車不動,太陽輪2不動,行星輪自轉不動,MG2不動。因此太陽輪1可以帶動行星架,進而帶動發動機啟動。
(3)能量流動:
發動機起動后,SOC較低時對蓄電池充電;SOC較高時,停止充電,并且關閉發動機。
2.2 起步工況
(1)過程描述:
起步時,視車況及起步要求分兩種情況:
1當發動機已熱且SOC高時,發動機無需起動而直接由動力蓄電池驅動MG2運行,即純電動模式運行。
2起步加速度要求較大時,輕踏油門,負荷加大,發動機轉速提高,但不會太高,因為此時車速很低,轉速過高,MG1就會過速。此時,MG2處于低速高扭矩區,提供大部分起步扭矩。
(2)工作狀態:
發動機提供主要的動力,拖動行星架轉動,同時帶動太陽輪1和太陽輪2。太陽輪1帶動MG1為發電機給電池充電,行星輪再將動力傳給太陽輪2輸出。MG2為電動機,提供起動扭矩。其中,發動機扭矩的70%分配到行星輪上再經太陽輪2傳遞到車輪,30%分配到太陽輪1上并驅動MG1發電,而大部分的起動扭矩來自MG2。
2.3 加速和爬坡工況
(1)過程描述:
在一定車速節氣門開度下,車輛進行加速或爬坡,電控單元會根據已有的控制策略,計算當前實際車況功率需求和蓄電池SOC,如果隨著加速踏板的深度加深,發動機提高轉速增大負荷,則單獨由發動機工作;當發動機單獨工作不能滿足功率要求時,由動力蓄電池給電機供電,輸出輔助功率。
(2)工作狀態:
行星架和太陽輪2都作正向轉動,MG1作發電機,MG2作電動機。當車速上升,MG2的轉速也上升;發動機轉速上升到一定值,MG1轉速就會下降直至反轉到其極限轉速。行星齒輪無級變速結構,加速時車速提高,通過MG1轉速下降到零并開始反轉來使車速繼續提高,而發動機的轉速可以穩定在高效區,因而實現無極變速(CVT)。
2.4 巡航工況
(1)過程描述:
1正常SOC范圍內,車輛低負荷狀態,發動機一邊驅動車輛,一邊驅動MG1發電,給蓄電池充電。
2正常SOC范圍內,車輛高負荷狀態,發動機一邊驅動車輛,一邊驅動MG1發電,同時一部分電能用于驅動MG2。
3SOC較高,車輛高負荷狀態,發動機一邊驅動汽車,一邊驅動MG1發電,并把所有的電能用于驅動MG2,以滿足功率要求。
4正常SOC范圍內,車輛全負荷運行時,蓄電池同時給MG1、 MG2供電,滿足峰值功率需求。
(2)工作狀態:
此時太陽輪1可能正轉也可能反轉,根據具體車速確定,行星架和太陽輪2正向轉動,MG1作發電機,MG2作電動機,全負荷運行時MG1也作為電動機。
(3)能量流動:
MG1發電經過逆變器轉換后給蓄電池充電,同時蓄電池給MG2提供電能,MG2輸出功率和發動機分配到太陽輪2的功率一起輸出到車輪。
2.5 滑行工況
(1)過程描述:
車速一定,松開油門,即進入了滑行模式。由于存在滾阻和空阻,車速逐漸下降。傳統汽車的發動機此時仍然通過傳動系與車輪相連,拖著發動機繼續運轉,即發動機制動(Engine Braking)。此時MG2為發電機并為蓄電池充電,通過MG2產生的拖拽力來模仿發動機制動。
(2)工作狀態:
太陽輪2轉動,帶動MG2作發電機,行星架正向轉動或靜止,太陽輪1反向轉動,MG1也發電。高速滑行時,如果發動機停轉,行星架靜止將會導致MG1過速,所以將MG1設計成發電機給蓄電池充電,并使行星架正向轉動。
(3)能量流動:
1高車速時,為了MG1不過速,發動機需要正向運轉,MG2模擬發動機制動發電給電池充電,MG1反轉發電給電池充電。
2低車速時,MG1不會過速,發動機可以停轉,MG2模擬發動機制動發電給電池充電,MG1也可以充電。
2.6 制動工況
制動工況與滑行工況類似,不同的是滑行時僅由電動機和發動機提供制動力,而在制動工況下,為了達到理想制動力曲線,需要前后輪的液壓系統提供額外的制動力補足僅由電動機和發動機產生的制動力。理想制動力曲線如圖1.3所示。
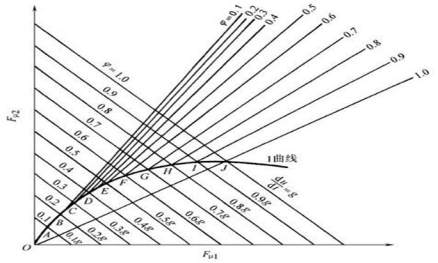
圖1.3理想制動力曲線
2.7 低速純電動工況
(1)過程描述:
車速較低且SOC較高時,發動機無需起動,動力蓄電池提供能量,由電機驅動車輛運行。
(2)工作模式:
太陽輪1反轉,行星架不動,太陽輪2正向轉動。MG1反轉,MG2為電動機驅動車輛。
2.8 倒車工況
(1)過程描述:
倒車時關閉發動機,采用純電動模式。
(2)工作模式:
太陽輪1正向轉動,行星架不動,太陽輪2反向轉動。MG1自由轉動,MG2作電動機。
要完成上述原理的要求,我們需要按如下幾個步驟完成:
1.五桿行星輪系齒輪設計
(1)選取行星齒輪減速器的傳動類型和傳動簡圖
(2)行星齒輪傳動的配齒計算
1.傳動比條件2.鄰接條件3.同心條件4.安裝條件
(3)行星齒輪傳動主要參數初算
1.通過齒面接觸強度算小齒輪分度圓直徑2.按齒根彎曲強度初算齒輪模數
(4)齒面接觸強度校核計算
1.齒面接觸應力2.許用接觸應力3.強度條件4.有關系數和接觸疲勞極限
(5)齒根彎曲強度的校核計算
1.齒根應力2.許用齒根應力3.強度條件4.有關系數和彎曲疲勞強度5.齒輪計算結果
2.五桿行星輪系軸設計
(1)輸入軸上的功率P,轉速n和轉矩T(2)軸上零件的定位方案(3)各個軸段的直徑和長度的確定(4)提高軸的強度的方法(5)軸的結構工藝性
3.制造裝配
Ⅲ、要解決的主要問題
(1)讓來自不同動力源的動力單獨輸出驅動HEV,或讓多個動力共同輸出驅動HEV,使彼此之間不發生干涉,提高傳動效率。
(2)設計出最適合本課題的五桿行星輪系類型。
(3)由于是傳動系,齒輪和軸等零件的強度和剛度都有一定要求,需要找出具有合適力學性能且經濟效率的傳動系。
|