項(xiàng)目的技術(shù)路線及預(yù)期成果
一、技術(shù)路線
機(jī)器人系統(tǒng)整體設(shè)計(jì)方案如圖1所示,整個(gè)系統(tǒng)可以分為以下主要部分:電源模塊、控制模塊、攝像頭模塊、語音模塊、電機(jī)驅(qū)動(dòng)模塊。其中攝像頭是機(jī)器人的眼睛,可以對(duì)物體進(jìn)行識(shí)別,包括形狀檢測(cè)和顏色檢測(cè);語音識(shí)別模塊是機(jī)器人的耳朵,可以聽取用戶所要求的任務(wù)信息;控制模塊是機(jī)器人的大腦,對(duì)于語音識(shí)別模塊采集的語音信號(hào)進(jìn)行分析然后確立搬運(yùn)方案,對(duì)攝像頭采集的圖像信號(hào)進(jìn)行查找目標(biāo)、分析確定行程路線、分析物塊形狀、分析物塊顏色,從而確定搬運(yùn)目的地;電機(jī)驅(qū)動(dòng)模塊是機(jī)器人的手和腳,手是機(jī)器人的機(jī)械臂,腳是機(jī)器人的輪子,機(jī)械臂可以更好的抓取并搬運(yùn)物塊,輪子能使機(jī)器人運(yùn)行到工作區(qū)域的各個(gè)位置;而電源模塊是機(jī)器人的心臟,用于給所有模塊供電,保證其正常的運(yùn)行。
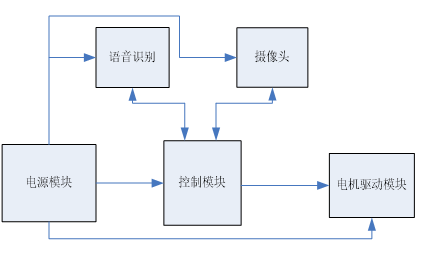
圖1機(jī)器人系統(tǒng)整體設(shè)計(jì)方案
(1)電源模塊
模塊采用兩節(jié)帶保護(hù)板的18650并聯(lián)電池供電,經(jīng)過一個(gè)DC/DC升壓模塊,將電源電壓穩(wěn)定到5V供電,再經(jīng)過線性穩(wěn)壓器AMS1117-3.3將其降壓到3.3V給芯片供電。一般鋰電池放電到2.8V就會(huì)被保護(hù)板自動(dòng)斷電,如果直接采用兩節(jié)電池串聯(lián)通過7805供電的話,那么當(dāng)電壓降到5.6V時(shí),7805會(huì)因?yàn)檩斎胼敵鲭妷翰钪挡粔颍馆敵鲭妷合陆档降陀?/span>5V,這時(shí)對(duì)于電機(jī)的供電驅(qū)動(dòng)就會(huì)和5V時(shí)候不一致,會(huì)導(dǎo)致原來設(shè)置好的轉(zhuǎn)動(dòng)角度以及其他的新能參數(shù)有偏差,從而導(dǎo)致系統(tǒng)不正常工作,而采用升壓的方案就不會(huì)因?yàn)殇囯姵胤烹妼?dǎo)致低電壓,從而保證系統(tǒng)正常工作。
(2)主控單元模塊
該模塊作為機(jī)器人的大腦,對(duì)攝像頭和麥克風(fēng)傳入的信號(hào)進(jìn)行分析處理,再通過GPIO控制電機(jī)使機(jī)器人動(dòng)起來。主要由處理器、SRAM、flash/EEPROM、GPIO、WIFI等部分組成。本項(xiàng)目將采用ARM Cortex A系列的處理器作為核心,ARM公司的Cortex-A系列處理器適用于具有高計(jì)算要求、運(yùn)行豐富操作系統(tǒng)以及提供交互媒體和圖形體驗(yàn)的應(yīng)用領(lǐng)域。鑒于本項(xiàng)目需要進(jìn)行數(shù)字圖像處理和嵌入式開發(fā),對(duì)于數(shù)字計(jì)算的能力要求較高,我們將采用Cortex A8以上級(jí)別的芯片。
(3)語音模塊
該模塊作為機(jī)器人的耳朵,用于聽取命令,使機(jī)器人按照命令執(zhí)行任務(wù)。主要由麥克風(fēng)、放大器、專業(yè)芯片組成。為了簡(jiǎn)化機(jī)器人的編程難度,我們將選用一個(gè)語音識(shí)別專用芯片—LD3320。LD3320芯片由ICRoute公司設(shè)計(jì)生產(chǎn)。該芯片集成了語音識(shí)別處理器和一些外部電路,包括AD、DA轉(zhuǎn)換器、麥克風(fēng)接口、聲音輸出接口等。本芯片在設(shè)計(jì)上注重節(jié)能與高效,不需要外接任何的輔助芯片如Flash、RAM等,直接集成在現(xiàn)有的產(chǎn)品中即可以實(shí)現(xiàn)語音識(shí)別/聲控/人機(jī)對(duì)話功能。并且,識(shí)別的關(guān)鍵詞語列表是可以任意動(dòng)態(tài)編輯的。
主要特征有:
l 1、通過ICRoute公司特有的快速而穩(wěn)定的優(yōu)化算法,完成非特定人語音識(shí)別。不需要用戶事先訓(xùn)練和錄音,識(shí)別準(zhǔn)確率95%。 l
2、不需要外接任何輔助的Flash芯片,RAM芯片和AD芯片,就可以完成語音識(shí)別功能。真正提供了單芯片語音識(shí)別解決方案。 l
3、每次識(shí)別最多可以設(shè)置50項(xiàng)候選識(shí)別句,每個(gè)識(shí)別句可以是單字,詞組或短句,長度為不超過10個(gè)漢字或者79個(gè)字節(jié)的拼音串。另一方面,識(shí)別句內(nèi)容可以動(dòng)態(tài)編輯修改, 因此可由一個(gè)系統(tǒng)支持多種場(chǎng)景。 l
4、芯片內(nèi)部已經(jīng)準(zhǔn)備了16位A/D轉(zhuǎn)換器、16位D/A轉(zhuǎn)換器和功放電路,
麥克風(fēng)、立體聲耳機(jī)和單聲道喇叭可以很方便地和芯片管腳連接。立體聲耳機(jī)接口的輸出功率為20mW,而喇叭接口的輸出功率為550mW,能產(chǎn)生清晰響亮的聲音。 l
5、支持并行和串行接口,串行方式可以簡(jiǎn)化與其他模塊的連接。 l
6、可設(shè)置為休眠狀態(tài),而且可以方便地激活。
l 7、工作供電為3.3V,如果用于便攜式系統(tǒng),使用3節(jié)AA電池就可以滿足
(4)攝像頭
攝像頭將采用OV7670攝像頭,體積小,工作電壓低,提供單片VGA攝像頭和影像處理器的所有功能。通過SCCB總線控制,可以輸入整幀、子采樣、取窗口等方式的各種分辨率8位影像數(shù)據(jù)。該產(chǎn)品VGA圖像最高達(dá)到30幀/秒。用戶可以完全控制圖像質(zhì)量、數(shù)據(jù)格式和傳輸方式。所有圖像處理功能過程包括伽瑪曲線、白平衡、飽和度、色度等都可以通過SCCB接口編程。OmmiVision圖像傳感器應(yīng)用獨(dú)有的傳感器技術(shù),通過減少或消除光學(xué)或電子缺陷如固定圖案噪聲、托尾、浮散等,提高圖像質(zhì)量,得到清晰的穩(wěn)定的彩色圖像。
對(duì)于機(jī)器人數(shù)字圖像處理的問題,由于我們并沒有系統(tǒng)的學(xué)習(xí)過數(shù)字圖像處理,而數(shù)字圖像處理本身就是一個(gè)大難點(diǎn),導(dǎo)致視覺識(shí)別是我們需要重點(diǎn)突破的地方。為了解決這一問題,我們將采用OPENCV的視覺庫來進(jìn)行圖像處理。OpenCV的全稱是:Open Source Computer Vision Library。OpenCV是一個(gè)基于BSD許可(開源)發(fā)行的跨平臺(tái)計(jì)算機(jī)視覺庫,可以運(yùn)行在Linux、Windows和Mac OS操作系統(tǒng)上。它輕量級(jí)而且高效—由一系列 C 函數(shù)和少量 C++ 類構(gòu)成,同時(shí)提供了Python、Ruby、MATLAB等語言的接口,實(shí)現(xiàn)了圖像處理和計(jì)算機(jī)視覺方面的很多通用算法。由于OPENCV只支持于一些操作系統(tǒng)的環(huán)境下,所以在嵌入式系統(tǒng)這一方面,我們也需要全面的學(xué)習(xí)。優(yōu)先選擇嵌入式Linux。
(5)電機(jī)驅(qū)動(dòng)模塊
電機(jī)模塊主要分為輪子電機(jī)和機(jī)械臂的電機(jī),輪子控制機(jī)器人位置的移動(dòng),機(jī)械臂控制機(jī)器人更好的抓取物塊。電機(jī)主要采用伺服電機(jī),伺服電機(jī)具有很好的精準(zhǔn)度,非常適合用于機(jī)器人上。通過給予伺服電機(jī)一系列脈沖信號(hào),電機(jī)即可根據(jù)脈沖數(shù)旋轉(zhuǎn)固定的角度。而對(duì)于電機(jī)供電方面,需要單獨(dú)供電與主控制電路隔離開來,這樣可以有效保護(hù)主電路穩(wěn)定性。
(6)軟件設(shè)計(jì)
軟件設(shè)計(jì)基于Linux平臺(tái)開發(fā)以及模塊單片機(jī)開發(fā),其語音模塊上就有一個(gè)單片機(jī),用于語音解碼,將語音信號(hào)翻譯成搬運(yùn)任務(wù)信號(hào)。主控單元搭載Linux操作系統(tǒng),用于接受搬運(yùn)任務(wù)信號(hào)、接受攝像頭的圖像信號(hào)、輸出電機(jī)控制信號(hào)、進(jìn)行圖像處理和整個(gè)機(jī)器人的信號(hào)交互與處理。
程序開始處于待機(jī)狀態(tài),等待用戶的語音命令。這時(shí)主控單元等待語音模塊的信號(hào)響應(yīng),語音模塊檢測(cè)到語音命令后會(huì)解析命令并向主控單元發(fā)送中斷信號(hào)以及經(jīng)處理過得搬運(yùn)任務(wù)信號(hào),主控單元響應(yīng)中斷信號(hào)并接受任務(wù)信息,同時(shí)將信息存入Flash。
接下來采用視覺導(dǎo)航和超聲波模塊來搜索物塊。找到物塊后,對(duì)物塊進(jìn)行圖像分析識(shí)別出物體的形狀和顏色進(jìn)行歸類。以確定要送到的目標(biāo)地,并進(jìn)行搬運(yùn)。最后找到目標(biāo)地并將物塊放入目標(biāo)地。程序判斷是否執(zhí)行完所有操作,如果沒有完成,繼續(xù)執(zhí)行搬運(yùn)任務(wù)。
機(jī)器人搬運(yùn)程序流程圖如圖2所示

圖2機(jī)器人搬運(yùn)程序流程圖
二、預(yù)期成果
1.項(xiàng)目總結(jié)報(bào)告一份。
2.制作分揀搬運(yùn)機(jī)器人實(shí)物一件。
3. 論文一篇或申請(qǐng)專利一項(xiàng)。
|