項(xiàng)目的技術(shù)路線及預(yù)期成果
1、技術(shù)路線
(1) 蛇形機(jī)器人的總體結(jié)構(gòu)設(shè)計(jì)
研究具有多節(jié)軀體�、軀體安裝履帶式行走輪���、各節(jié)軀體通過(guò)兩自由度轉(zhuǎn)向關(guān)節(jié)連接的蛇形機(jī)器人綜合構(gòu)型����,通過(guò)對(duì)軀體行走電機(jī)���、關(guān)節(jié)轉(zhuǎn)向電機(jī)的控制���,可實(shí)現(xiàn)機(jī)器人在電纜溝內(nèi)水平爬行�、直角拐彎���、豎立攀爬越障和全方位的電纜檢測(cè)�����。
分析機(jī)器人的受力情況�,以受力均衡為準(zhǔn)則�����,研究紅外和可見(jiàn)光視頻檢測(cè)裝置�����、各類傳感器、無(wú)線數(shù)據(jù)傳輸裝置、蓄電池等在機(jī)器人上的布置。
蛇形巡檢機(jī)器人的總體結(jié)構(gòu)如圖1所示: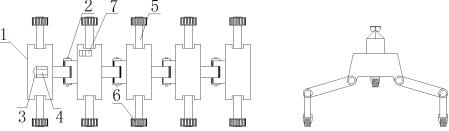
圖9蛇形巡檢機(jī)器人的總體結(jié)構(gòu)
1.機(jī)器人軀體 2.軀體轉(zhuǎn)向關(guān)節(jié) 3.云臺(tái) 4.視頻監(jiān)測(cè)裝置 5.機(jī)器人行走臂6. 行走輪7.傳感器
(2) 蛇形機(jī)器人的運(yùn)動(dòng)控制
根據(jù)電纜溝的地形、地貌��,研究蛇形機(jī)器人各軀體行走輪電機(jī)���、關(guān)節(jié)轉(zhuǎn)向電機(jī)的整體協(xié)調(diào)控制方法���,實(shí)現(xiàn)機(jī)器人的精準(zhǔn)運(yùn)動(dòng)控制�。
(3) 建立具有視、聽(tīng)、嗅功能的機(jī)器人綜合感知系統(tǒng)
根據(jù)電纜運(yùn)行特性�,建立具有視�����、聽(tīng)��、嗅功能的機(jī)器人綜合感知系統(tǒng)����,其中視覺(jué)感知采用熱成像和可見(jiàn)光成像相結(jié)合��;聽(tīng)覺(jué)感知采用拾音器用于測(cè)量電纜設(shè)備噪聲��,通過(guò)基于聲源的定位方法,計(jì)算息采集的延遲和幾何關(guān)系以判斷聲源位置����、強(qiáng)度和方向����;嗅覺(jué)檢測(cè)電纜運(yùn)行所發(fā)出的異味�,采用具有嗅覺(jué)功能的電子鼻結(jié)構(gòu),對(duì)電纜異味形成連續(xù)不斷的檢測(cè)�����。基于以上多傳感器信息融合的綜合感知系統(tǒng)����,可對(duì)電纜狀態(tài)進(jìn)行全方位的快速感知和識(shí)別��。
(4)機(jī)器人的視覺(jué)導(dǎo)航與定位
在電纜溝的復(fù)雜環(huán)境下,靈活、精確的機(jī)器人導(dǎo)航與自定位是一大難題���,為此本項(xiàng)目將開(kāi)展基于視覺(jué)的電纜溝行走路線識(shí)別、障礙物檢測(cè)與導(dǎo)航避障控制的研究,力圖解決巡檢機(jī)器人的導(dǎo)航�����、定位問(wèn)題�。
(5)電纜溝運(yùn)行狀態(tài)的智能評(píng)估方法
根據(jù)獲取的電纜溝狀態(tài)數(shù)據(jù)�����,研究基于多傳感器信息融合方法�,建立智能化的數(shù)據(jù)分析系統(tǒng)�����,對(duì)電纜溝道內(nèi)整條電纜溫度的分布與變化�����、電纜絕緣情況、報(bào)警類型與報(bào)警等級(jí)��,有無(wú)非法入侵�����、電纜設(shè)備外觀有無(wú)異常等電纜運(yùn)行狀態(tài)做出有效的評(píng)估�。
2����、預(yù)期成果
(1)制做1臺(tái)電纜溝巡檢機(jī)器人;
(2)撰寫(xiě)項(xiàng)目研究技術(shù)報(bào)告:包括蛇形機(jī)器人的運(yùn)動(dòng)模模型及其控制方法�;蛇形機(jī)器人的視�、聽(tīng)��、嗅功能綜合感知系統(tǒng)���;蛇形機(jī)器人的智能評(píng)估���;
|